


Random Team | Bring Your Own Solution
Murcia
Team Updates
We are the Random Team
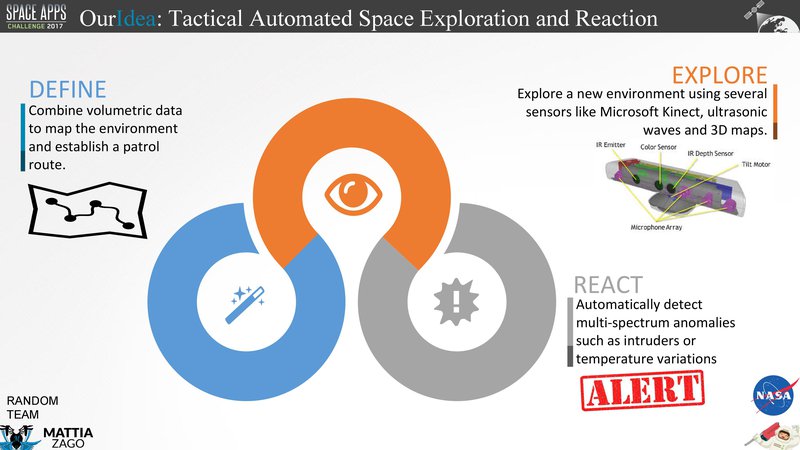
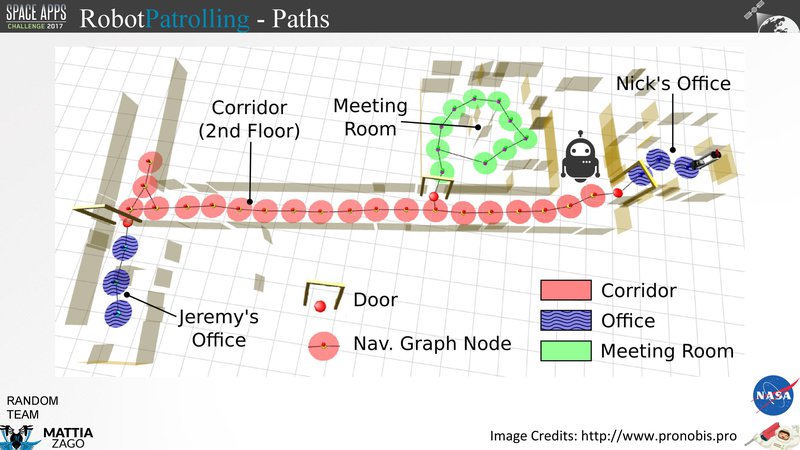
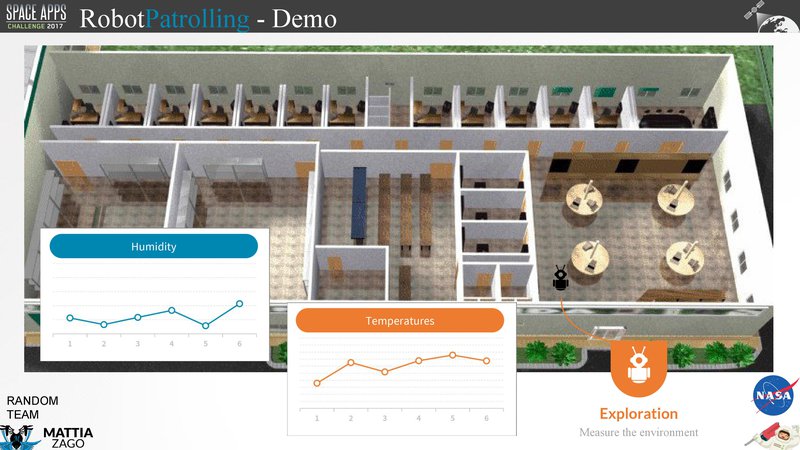
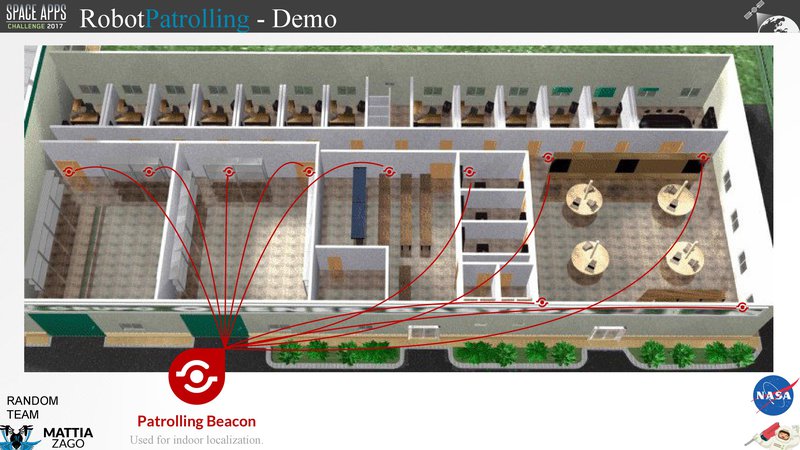
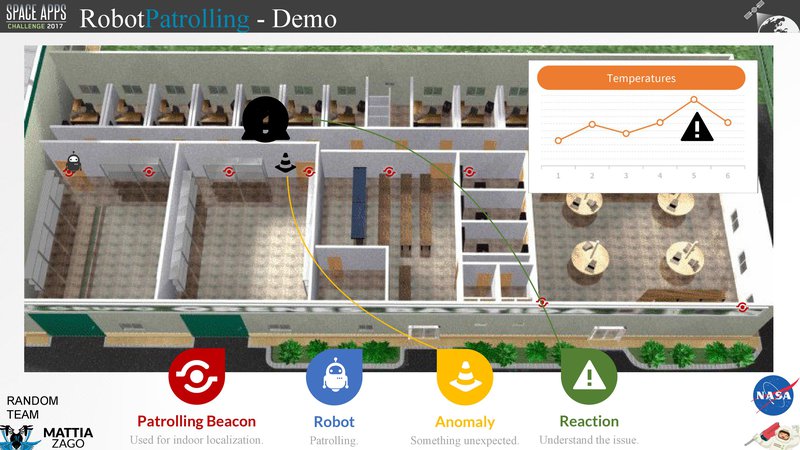
Our prototype involves indoor multi robot collaborative system to explore and patrol a given hostile environment.
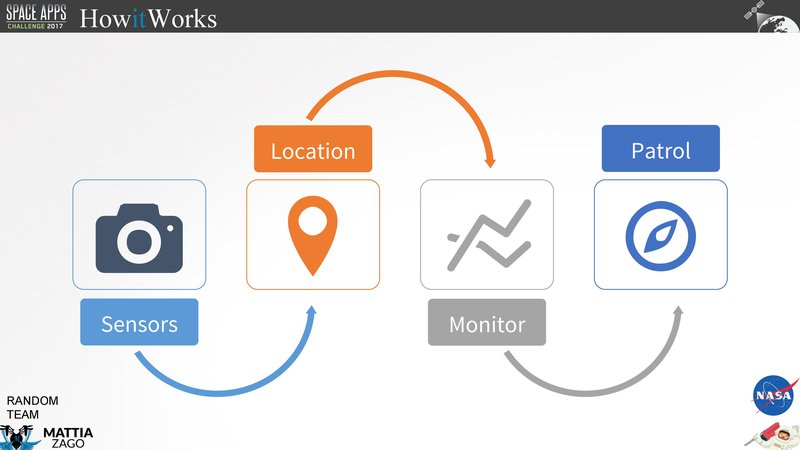
by now, our omniwheel robot combines multiple tools such us a sonar, infrared rays and a Microsoft kinect to monitor and analyse the space around. Moreover, our BL based location mechanism is able to pinpoint each bot while the intelligence behind dynamically reorganise them.
Presentation Page1
page2
page3

page4

page5

page6
page7
page8

page9
page10
page11
page12

page13
page14

page15

page16
page17

#Robotijo

Step by step...

Random Team

SpaceApps is a NASA incubator innovation program.